Smelter/sulphuric acid is a common chemical by-product of the smelting process in mining. Given the risks associated with human exposure to a concentrated acid, it is carefully collected, stored and transported to ensure the health and safety of workers and surrounding communities. Several people work in the acid loading facility on a given shift at the Copper Cliff facility from Vale, located in Sudbury, ON. On a typical day, 24-36 rail tank cars are loaded with acid.
Empty rail tank cars are brought into the sulphuric acid loading station. Once parked and secured beneath the acid loading ramp/bridge, the fill valve on the top of the rail tank car is manually unlocked with pipe wrenches and other hand tools. During this activity, accumulated pressure in the empty tank developed naturally due to temperature differences between the atmosphere and the sealed tank, can lead to an unsuspecting worker getting “sprayed” by residual acid that is released as a result of de-pressurization. Although all workers wear personal protective equipment, it creates the risk of exposure that can lead to acid burns.
Challenge
An unstructured scenario is identified due to the variety of wagons and how the robotic solution must approach each one. It is impossible to ensure the spatial location of the hatches and their components or shapes in advance. It imposes challenges such as:
- Manipulating different types of components, without human physical intervention, in unstructured environments.
- Components cannot be modified, and handmade manipulation must be allowed.
- Create a solution able to handle a wide variety of hatches models without modifying them.
- Develop a robust robotic solution envisioning the capability of working in acid environments and harsh weather conditions.
Solution
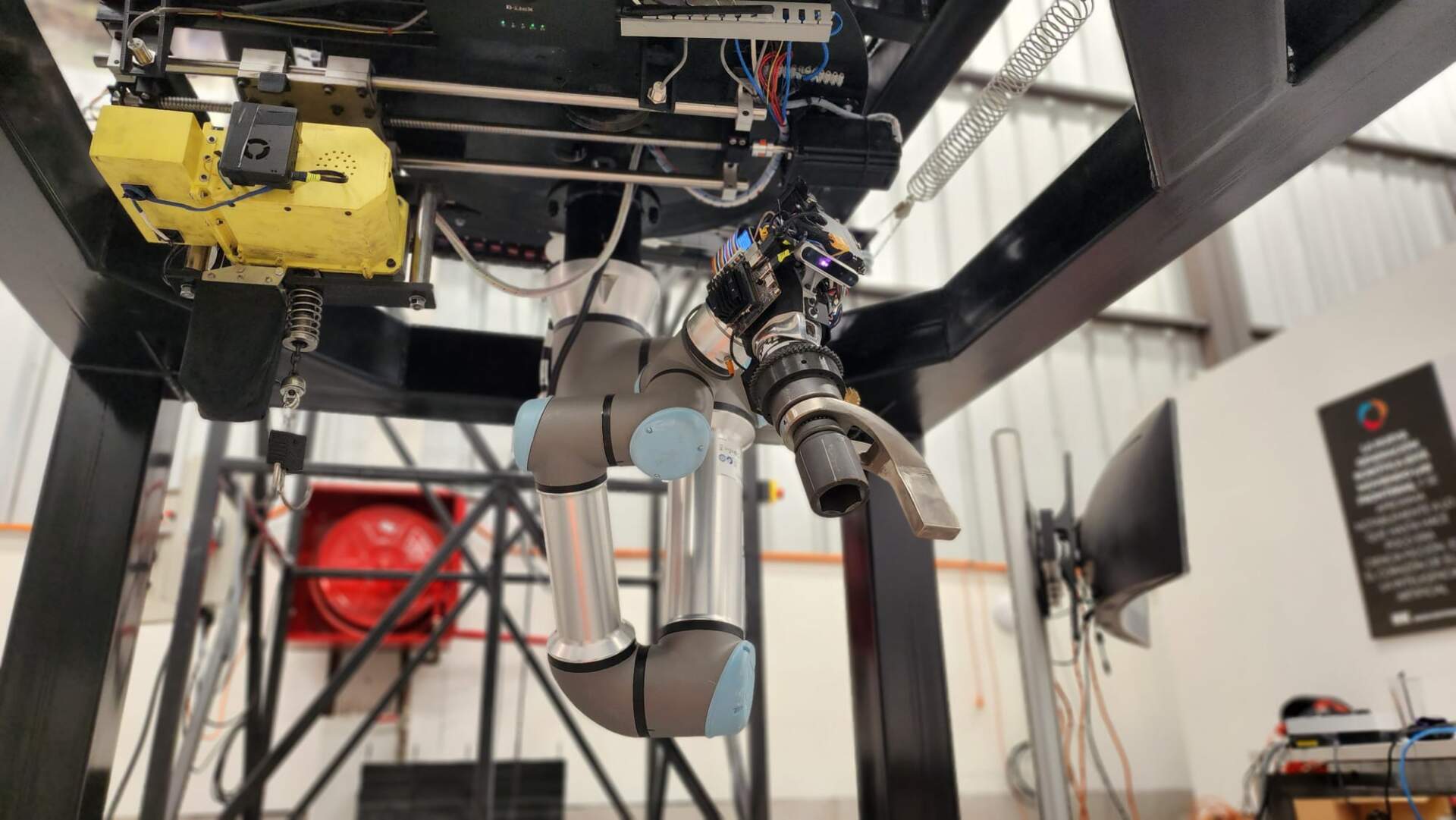
SK Godelius developed a solution based on a robotic arm that positions a tool capable of loosening and re-tightening the nuts that release the hatch cover.
- A combined topographic-type altimetry system was developed with an artificial vision system based on a stereo-vision camera and the projection of a random pattern.
- A digital twin model is built in real-time with the visual information of the environment and a digital model of the robot’s parts and the other equipment. It represents the environment and the systems involved.
- A trajectory planner was developed that simulates various trajectories in the twin until a feasible and optimal one is achieved.
- The step of inserting the tool into the nut cannot be solved by calculating trajectories because it is an unstructured environment. To solve it, we used force-oriented controls so the robot acts as if it has a sense of touch.
“Finding the right partner is key: technical skills are important, but the ability to co-create, share risk and find creative ways to quickly demonstrate concepts were all key success factors in the work we did together.”
Suzanne Balima, Strategy and Business Transformation at Vale
Result
The development of a robot that can work completely teleoperated or semi-autonomously with human assistance from a remote operator to complete the proposed task or adjust for unforeseen and/or complex situations. The state-of-the-art technologies leveraged in our solution include:
- Stereoscopic vision allows the operator to have the depth perception to interact naturally with the environment.
- 3D camera to detect bolts and align the tool with the bolt’s axis. The 3D camera’s information will automatically be applied to determine each nut’s tool’s movement.
- Positioning system
- Collision avoidance
- Power balance between elements
- Wiring
- Connectivity
- Mechanical engineering
“I thought it was amazing to see the project evolve from a 3D model to incrementally developing the robot hardware, software, and seeing it come to life. It was a fantastic experience learning from the Godelius team from a technical perspective, but also seeing their innovative DNA rub off on our team. It was a true pleasure working together”
Suzanne Balima, Strategy and Business Transformation at Vale