Global navigation satellite systems (GNSS) such as GPS have long been integrated into commercial solutions for mining, defence, supply chain and logistics industries. While GPS was initially developed for military applications, it has become widely used in a variety of civilian applications, including navigation for cars and boats, tracking of vehicles and shipping containers, and location-based services such as mapping and location-based search. But if you think the modern-day applications for GPS are limited to the wayfinding app on your phone or in your car, think again.
GNSS, which also includes Galileo and Glonass technologies, have become commonplace and are widely adopted in a variety of industries all the way from their original defence applications to everyday innovations like Uber and Corner Shop or Door Dash.
How is satellite data changing robotics?
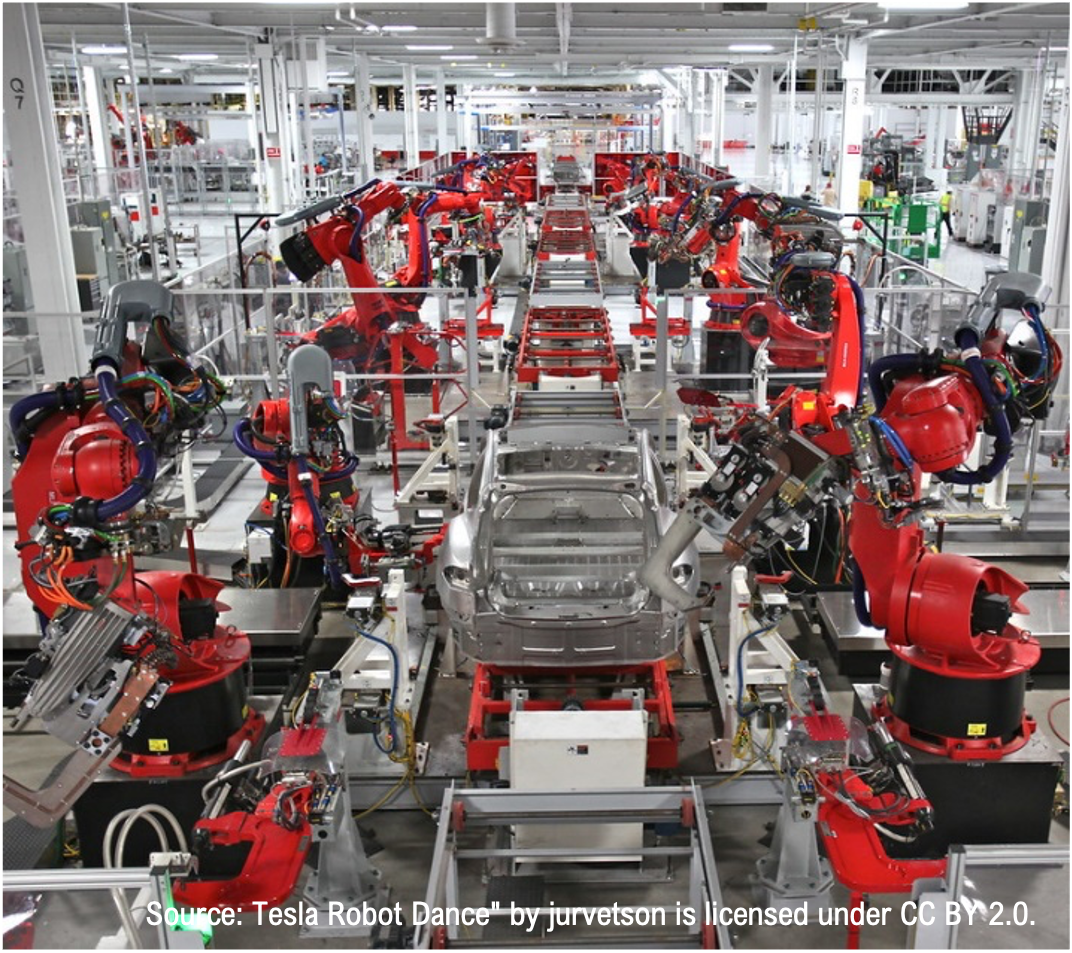
The integration of satellite data into robotic solutions is a game changer for industries looking to advance their use of technology. It allows robotic solutions to operate more anonymously and (when combined with other innovations such as low-earth satellites) with lower latency.
“A lot of everyday things have been made possible because of satellite images,” explains Andres Alvarado, Civil Engineer. “These images give us the ability to look at the world from afar and analyze all that data quickly.”
New products and innovations such as path-following agricultural machines and inspection drones depend on GNSS, and satellite-based imaging using hyperspectral cameras is widely used to monitor and manage agricultural lands and natural resources.
When we talk about the usage of satellites in robotic applications, we can simply think of two different kinds of solutions:
- Field robotics: a subfield that focuses on designing, developing, and deploying robots for use in outdoor environments or other challenging and unstructured settings. It is an interdisciplinary field that draws on expertise from robotics, computer science, electrical and mechanical engineering, and other related disciplines. Field robotics aims to create robots that can operate autonomously or semi-autonomously in natural or man-made environments, including fields, forests, deserts, oceans, and other remote and harsh locations. Field robots typically need to be rugged and durable enough to withstand extreme weather conditions, rough terrain, and other environmental hazards. They may also need to be able to navigate using a variety of sensors, such as GPS, LIDAR, and cameras. They may require specialized software and algorithms for planning and executing complex tasks. Field robotics applications include environmental monitoring, agriculture, search and rescue, mining, construction, exploration, among others.
- Unstructured environments: environments characterized by a lack of order or structure. These environments can include natural environments, such as forests, deserts, and bodies of water, and urban environments, such as city streets and buildings. In unstructured environments, the layout and terrain of the environment can be highly variable, with a range of obstacles and challenges that can make navigation and task completion difficult. For example, in a forest environment, a robot may need to navigate around trees, underbrush, and uneven terrain, while avoiding obstacles such as rocks and fallen logs. Unstructured environments can present a range of challenges for robots, as they typically require a high degree of autonomy and adaptability in order to navigate and complete tasks effectively. To address these challenges, robots in unstructured environments often rely on a range of sensing technologies, such as LIDAR, cameras, and other sensors, to gather information about the environment and enable real-time decision-making. Additionally, these robots may incorporate machine learning algorithms to adapt to the environment over time and improve their performance.

Two approaches to mapping are commonly used in the field of robotics to help robots navigate and complete tasks in a range of environments.
- Local mapping, also known as “localization” or “situational awareness,” involves building a map of the immediate environment around the robot, typically within a few meters of the robot’s current location. It is typically used in situations where the robot needs to complete tasks in a relatively small area. Local mapping is generally achieved using various sensors, including LIDAR, cameras, and other sensors, which provide information about the robot’s immediate environment. By using this information to build a local map of the environment, the robot can navigate through the environment, avoiding obstacles and completing tasks more efficiently.
- Global mapping involves building a map of a larger area, typically ranging from several meters to several kilometres in size. Global mapping is typically used when the robot needs to navigate through a larger environment, such as in outdoor exploration or agriculture. Global mapping generally is achieved using a range of sensors, including GPS, LIDAR, and cameras, which provide information about the environment over a larger area. By using this information to build a global map of the environment, the robot can navigate through the environment more efficiently, avoiding obstacles and completing tasks more effectively. Global mapping provides a broader view of the environment, allowing the robot to navigate through larger areas more efficiently. However, global mapping may not offer the same level of detail about the immediate environment as local mapping, which may limit the robot’s ability to complete tasks with a high degree of accuracy.
In many cases, a combination of local and global mapping may be used to provide the robot with the best possible view of the environment, allowing it to navigate and complete tasks with a high degree of accuracy and efficiency.
In specific fields of robotic applications, global mapping can be created using multiple data sources from satellites. This global view of the place of interest can enhance the performance and capabilities of robots operating in remote and challenging environments, for example:
- Navigation: Satellites can provide accurate and reliable information through GPS or satellite-based positioning systems. This information can be used to improve the navigation of field robots, allowing them to move precisely and safely in challenging environments.
- Communication: Satellites can act as a communication link between robots operating in the field and their operators or control centers located elsewhere. This is particularly useful in remote areas where other forms of communication, such as radio or cellular networks, may not be available.
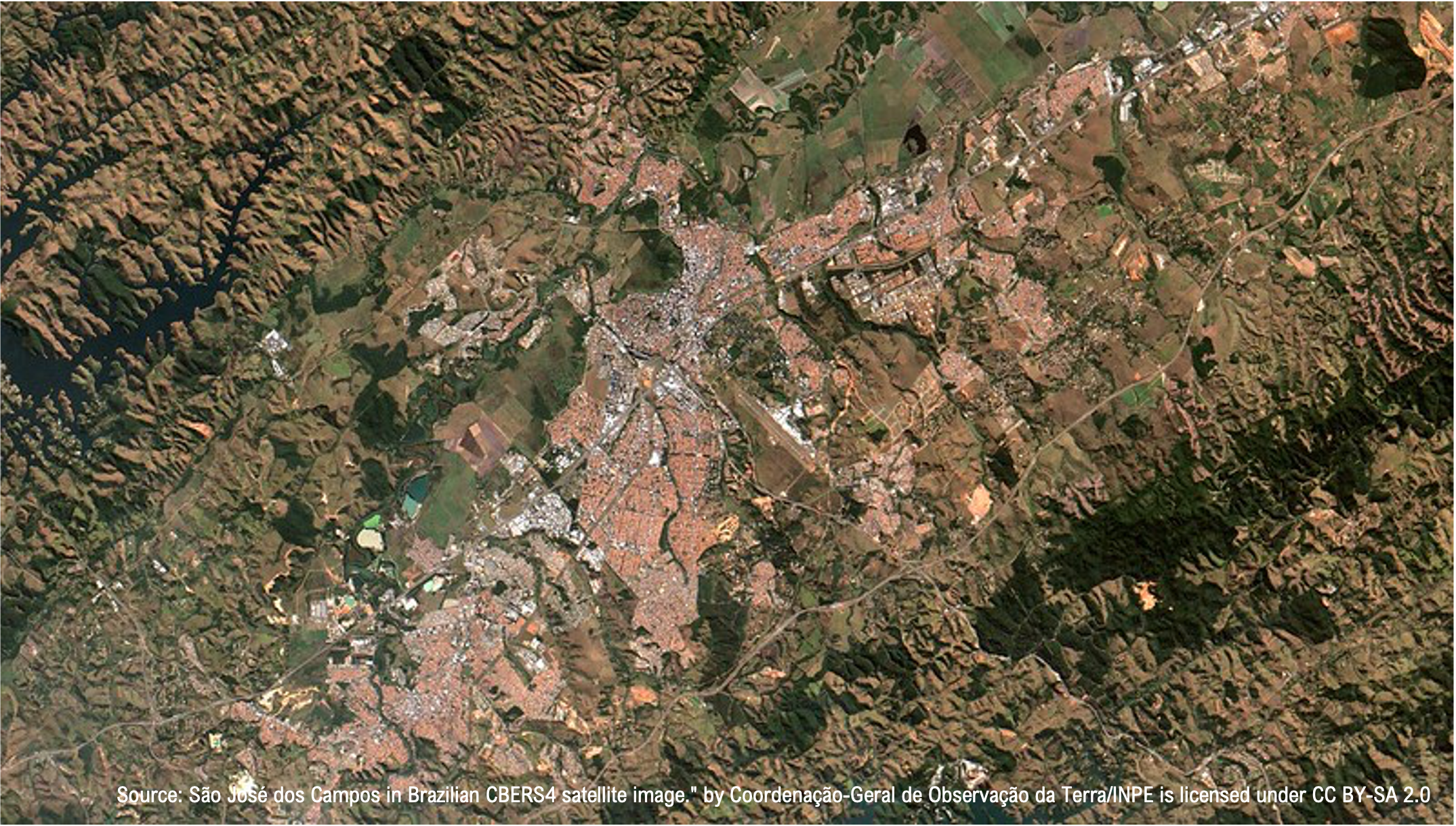
- Earth observation: Satellites can provide high-resolution images and other data about the Earth’s surface, which can be used to guide the operations of field robots. For example, satellite data can be used to identify areas of vegetation or other features of interest, which field robots can then target for data collection or other tasks.
- Weather forecasting: Satellites can provide real-time data on weather conditions, including temperature, humidity, wind speed, and precipitation. This information can be used to guide the operations of field robots and to ensure their safety in harsh weather conditions.
Overall, the use of satellites in field robotics can significantly enhance the capabilities and performance of robots operating in remote and challenging (and changing) environments. One source of data is earth observation from satellites:
- Landsat: The Landsat program provides satellite images of the Earth’s surface that can be used to study changes in land use, vegetation cover, and other environmental factors. The images are freely available through the US Geological Survey’s (USGS) website.
- MODIS: The Moderate Resolution Imaging Spectroradiometer (MODIS) is a key instrument on two NASA Earth Observing System (EOS) satellites that provide data on land surface temperature, vegetation cover, and other environmental factors. The data can be downloaded for free from the NASA Earthdata website.
- Sentinel: The European Space Agency’s (ESA) Sentinel program includes a series of satellites that provide high-resolution imagery of the Earth’s surface, as well as data on land use, vegetation cover, and other environmental factors. The data can be accessed for free through the Copernicus Open Access Hub.
- Planet: Planet is a commercial provider of satellite imagery that offers a range of data products, including high-resolution imagery of the Earth’s surface and data on land use, vegetation cover, and other environmental factors. Planet offers a limited amount of data for free through its Explore page.
- Digital Elevation Model (DEM): DEMs are digital representations of the Earth’s terrain that can be used to create 3D models of the environment. DEM data is available for free through a variety of sources, including the USGS and the NASA Earthdata website.
These are just a few examples of the types of earth observation data that are freely available for use in field robotics. Other data sources include weather, ocean, and climate data, among others.
One type of dataset used by SK Godelius for field robots is Digital Elevation Models (DEMs), which are available in a range of resolutions, depending on the source of the data and the area of coverage. Here are some examples of the resolutions that DEMs are commonly available in:
- Global coverage: Global DEMs are available at a resolution of 30 meters, which means that each pixel in the image represents an area of 30 meters by 30 meters on the ground. The most widely used global DEM is the Shuttle Radar Topography Mission (SRTM) DEM, which NASA acquired in 2000.
- National coverage: Many countries have developed their own high-resolution DEMs for national coverage. For example, the USGS provides a national coverage DEM called the National Elevation Dataset (NED), which has a resolution of 1/3 arc-second (approximately 10 meters) for most of the United States.
- Local coverage: DEMs with even higher resolution are available for smaller areas or specific regions. For example, the United Kingdom provides a national coverage DEM at a resolution of 50 meters, but more detailed DEMs with 1-5 meters resolutions are available for specific regions.
- LiDAR data: Light Detection and Ranging (LiDAR) data is a type of remote sensing technology that can provide very high-resolution DEMs with less than 1-meter resolutions. LiDAR data is commonly used for mapping and surveying applications, but it can also be used in field robotics for terrain mapping and navigation.

In general, the resolution of DEMs depends on the quality and quantity of the input data used to create the model. Higher quality data and more advanced processing techniques can lead to higher resolution DEMs but may also require more resources and expertise to acquire and process.
Field robots also benefit from satellite communications to provide a reliable and long-range communication link between the robots and their operators or control centers. Below are some key features and considerations related to satellite communications in field robotics:
- Coverage: Satellite communications can provide coverage in remote and challenging environments where other forms of communication, such as cellular networks, may not be available. Satellites can cover large areas of the Earth’s surface, including oceans and polar regions, which can be challenging to reach with other communication methods.
- Bandwidth: Satellite communications can provide high-bandwidth data transmission capabilities, which can help send large amounts of data, such as video or sensor data, from the robot to the operator or control center.
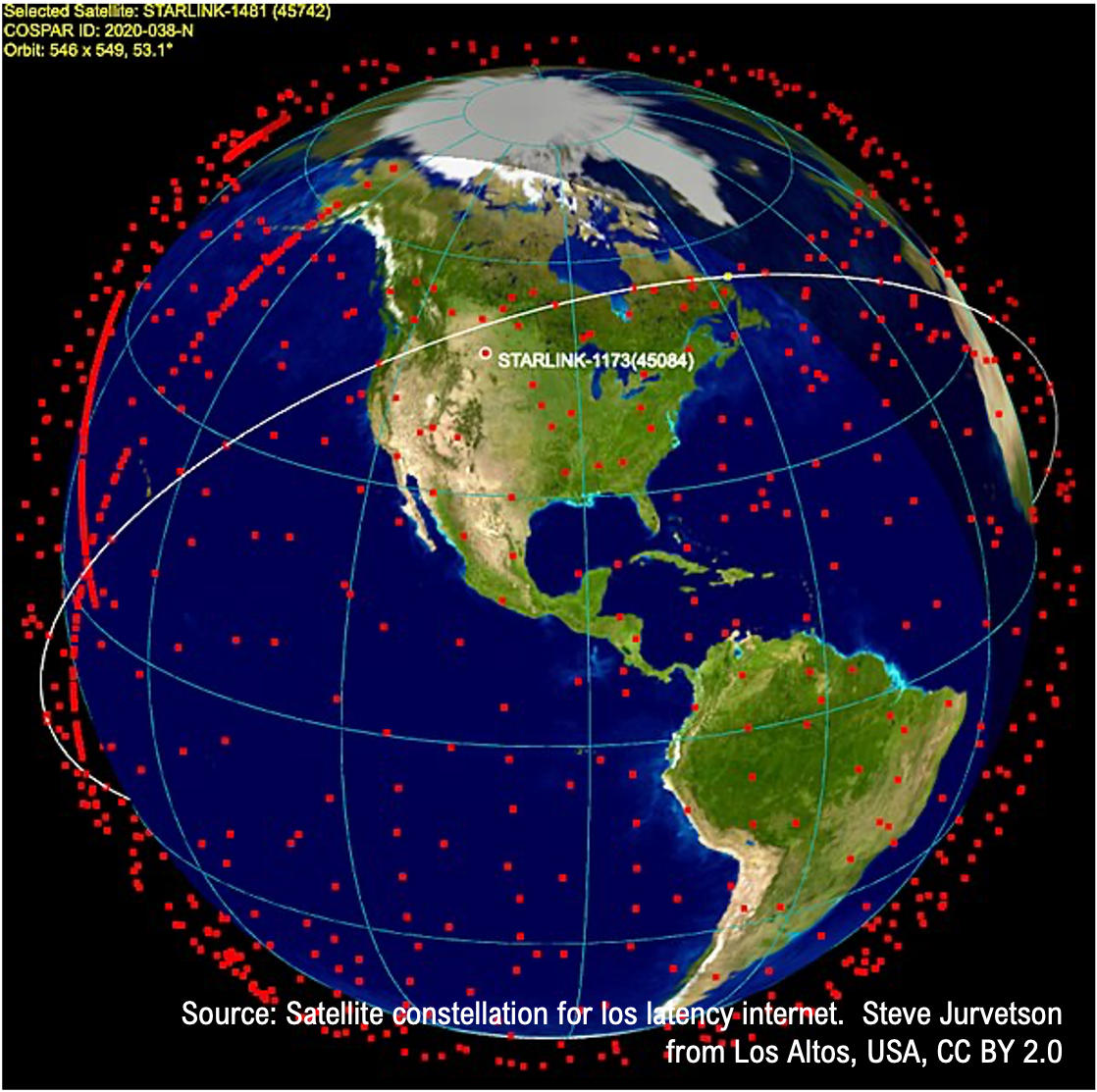
- Latency: Satellite communications typically have higher latency than other forms of communication due to the distance the signal needs to travel to reach the satellite and back. However, low-latency satellite communication systems are being developed to meet the needs of applications that require near-real-time communication. One example of a low-latency satellite communication system is the Low Earth Orbit (LEO) satellite constellation, which includes networks of small satellites in low Earth orbit that can provide high-speed, low-latency communication. These LEO satellite networks can achieve lower latency than traditional geostationary satellite systems because they are located at a much lower altitude and can communicate directly with ground stations without relays or repeaters.
Satellite communications can be a powerful tool for enabling long-range and reliable communication between field robots and their operators or control centers. However, the costs and technical challenges associated with satellite communications should be carefully considered when planning and implementing a field robotics project.
For many field robotics applications, more than having maps is needed: changes in environmental conditions, such as sandstorms in the desert, will affect the robot’s capacity to work reliably. Fortunately, satellite imaging can be used to predict sandstorms, as it can provide information on atmospheric conditions, weather patterns, and other environmental factors that can contribute to the formation and movement of sandstorms.
These predictive models can provide early warnings of sandstorms, which can help minimize the impact on the robot’s missions. Overall, satellite imaging and other satellite-based data sources are valuable tools for predicting and mitigating the impact of sandstorms and other climate-related events.
While the accuracy and range of weather forecasting using satellite images depend on several factors, including the quality of the satellite data, the accuracy of the weather models used, and the complexity of the weather patterns being forecast. However, weather forecasting using satellite images can generally provide useful information for a range of time scales, from hours to several days in advance.
Finally, the most common use of satellites is navigation. Nevertheless, more than precision might be needed for field robots in some applications. The error of a Global Navigation Satellite System (GNSS) measurement, such as GPS, GLONASS or Galileo, is the difference between the proper position of a receiver on the Earth’s surface and the position calculated by the receiver based on the satellite signals. A variety of factors, including environmental factors, receiver limitations, and signal propagation effects, can cause GNSS errors. Below are some examples of common sources of GNSS errors:
- Atmospheric errors: GNSS signals can be affected by the Earth’s atmosphere, which can cause errors in the measured position. These errors are caused by the delay and distortion of the signal as it passes through the atmosphere and can be corrected using techniques such as atmospheric modelling and signal filtering.
- Multipath errors: Multipath errors occur when the GNSS signal reflects off nearby objects, such as buildings or terrain, before reaching the receiver. These reflections can cause the receiver to calculate an incorrect position and can be mitigated using antenna design and signal filtering techniques.
- Receiver errors: GNSS receivers can introduce errors in the position calculation due to limitations in the receiver hardware or software. These errors can include clock drift, signal quantization, and measurement noise, among others.
- Orbital errors: GNSS satellites can experience orbital errors due to perturbations from the Earth’s gravity and other factors. These errors can be corrected using information from ground-based monitoring stations and other sources.
- User errors: Finally, errors in the use of the GNSS system can also contribute to the overall error in the measured position. These errors can include incorrect antenna placement, incorrect time synchronization, and user error in interpreting the measurement results.
The error of a GNSS measurement depends on a variety of factors. It can range from a few to tens of meters, depending on the specific application and the quality of the GNSS system.
Fortunately, there are several techniques and strategies that can be used to reduce the errors in Global Navigation Satellite System (GNSS) measurements:
- Differential GPS: Differential GPS (DGPS) is a technique that involves using a reference station with a known location to calculate the difference between the GPS signal and the known position. This difference can then be used to correct the position calculation of the GPS receiver, reducing the errors in the measurement.
- Real-time kinematic (RTK) GPS: RTK GPS is a technique that involves using a base station with a known location and a mobile receiver to calculate precise, high-accuracy position information in real time. This technique relies on the use of carrier-phase measurements and specialized algorithms to estimate exact position information. It can reduce the errors in the GPS measurement to a few centimetres.
- Signal filtering: Signal filtering is a technique that involves using digital signal processing techniques to remove noise and other unwanted signals from the GPS measurement. Filtering can reduce errors caused by multipath interference, atmospheric effects, and other noise sources in the GPS signal.
- Antenna placement and design: Antenna placement and design can also significantly impact the accuracy of GPS measurements. Antennas should be placed in a clear, unobstructed location, away from sources of interference, and should be designed to minimize multipath interference.
- Signal augmentation: Signal augmentation involves using additional sources of information, such as ground-based beacons or satellite-based correction signals, to improve the accuracy of GPS measurements. These signals can be used to correct errors caused by atmospheric effects, satellite orbit errors, and other sources of GPS signal error.
Combining these techniques and strategies can reduce errors in GNSS measurements. The specific approach used will depend on the application, the quality of the GNSS system being used, and the specific sources of error affecting the measurement.
Working with satellites and satellite data is crucial to operating with field robotics in unstructured environments. Satellite information complements situational awareness (local mapping) with global information, giving the systems a general context for changing environments.
How our clients are using satellite data
Few industries have as much opportunity to integrate satellite data as the mining industry. At SK Godelius, we’ve collaborated with a number of companies to help create customized robotic solutions to improve efficiency, safety, and productivity. Some examples of how our clients are using GPS data include:
- Vehicle and equipment tracking: GPS is used to track the location of mining vehicles and equipment, such as trucks and excavators. This allows mining companies to optimize the use of their equipment, reduce downtime, and improve overall efficiency.
- Mapping and surveying: GPS maps mines and mineral deposits and surveys the surrounding terrain. This allows mining companies to plan and execute mining operations more efficiently and to identify new mineral deposits.
- Safety and security: GPS is used to monitor the location of workers and equipment in real time, which can improve safety and security in the mine.
- Automatic guidance systems: GPS can be used to guide mining vehicles and equipment, such as drilling and excavating equipment, to specific locations within the mine. This allows mining companies to improve productivity and reduce the risk of human error.
- Communication: By using GPS to provide a common reference frame, robots can communicate with one another using their GPS coordinates, allowing them to determine their relative position. This can greatly reduce the latency in communication, as the robots do not need to rely on other methods, such as image processing or other sensors, to determine their relative position.
- Exploration: GPS is used to explore and map mines and mineral deposits and to survey the surrounding terrain. This allows mining companies to identify new mineral deposits and plan mining operations more efficiently.
Create a robotic solution for your business with SK Godelius
Want to learn more about how you can integrate satellite data into a robotic solution?
As an industry leader, we conceive, develop, manufacture, integrate, implant, and operate engineering solutions related to automation, teleoperation, robotization and the connectivity of large machines, vehicles, robots and processes in open-pit and underground mining. No matter which environment and operational framework we are at, our priority is to work with you to develop individual projects that bring value to your business. Whether it is wayfinding, autonomous missions, low latency communications or remote operation solutions, our team is ready to help you solve your robotics challenges.
Contact us to learn more about our process and how we can help your business innovate with robotics in unstructured environments.
