Los sistemas globales de navegación por satélite (GNSS), como el GPS, se han integrado durante mucho tiempo en soluciones comerciales para las industrias de minería, defensa, cadenas de suministro y logística. Si bien el GPS se desarrolló inicialmente para aplicaciones militares, se ha vuelto ampliamente utilizado en una variedad de aplicaciones civiles, incluida la navegación para automóviles y embarcaciones, el seguimiento de vehículos y contenedores de envío, y los servicios basados en la ubicación, como la cartografía y la búsqueda basada en la ubicación. Pero si cree que las aplicaciones modernas para GPS se limitan a la aplicación de orientación en su teléfono o en su automóvil, piénselo de nuevo.
GNSS, que también incluye las tecnologías Galileo y Glonass, se ha convertido en un lugar común y se adopta ampliamente en una variedad de industrias, desde sus aplicaciones de defensa originales hasta innovaciones cotidianas como Uber y Cornershop o Waze.
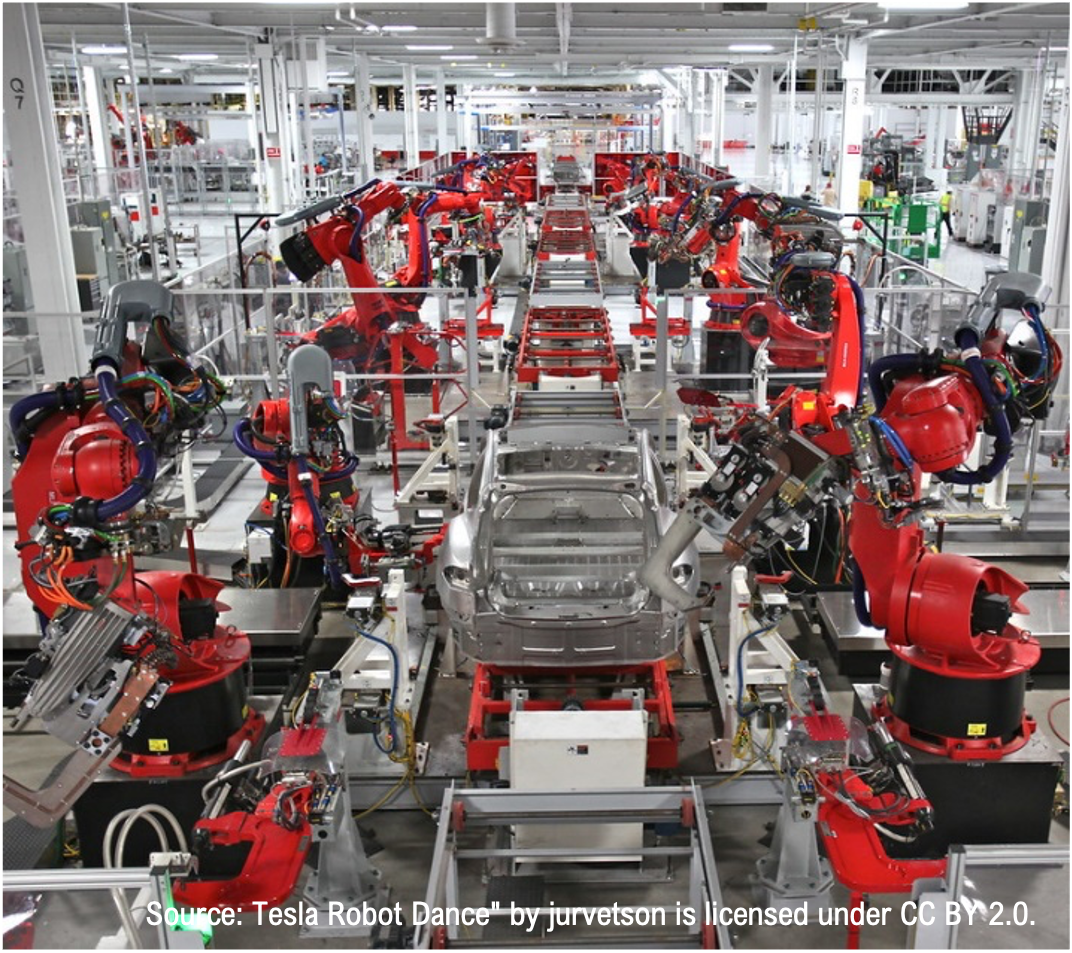
¿Cómo los datos satelitales están cambiando la robótica?
La integración de datos satelitales en soluciones robóticas es un cambio radical para las industrias que buscan avanzar en el uso de la tecnología. Permite que las soluciones robóticas operen sin que siquiera nos demos cuenta y (cuando se combinan con otras innovaciones, como los satélites de baja altura) con una latencia muy baja.
“Muchas cosas cotidianas han sido posibles gracias a las imágenes satelitales”, explica Andrés Alvarado, Ingeniero Civil. “Estas imágenes nos dan la capacidad de mirar el mundo desde lejos y analizar todos esos datos rápidamente”.
Los nuevos productos e innovaciones, como las máquinas agrícolas que siguen caminos preestablecidos y los drones de inspección, dependen del GNSS, y las imágenes satelitales que usan cámaras hiperespectrales se usan ampliamente para monitorear y administrar las tierras agrícolas y los recursos naturales.
Cuando hablamos sobre el uso de satélites en aplicaciones robóticas, simplemente podemos pensar en dos tipos diferentes de soluciones:
- Robótica de campo (field robotics): un subcampo que se centra en el diseño, desarrollo y despliegue de robots para su uso en entornos abiertos típicamente al aire libre. Es un campo interdisciplinario que se basa en la experiencia de la robótica, la informática, la ingeniería eléctrica y mecánica y otras disciplinas relacionadas. La robótica de campo tiene como objetivo crear robots que puedan operar de forma autónoma o semiautónoma en entornos naturales o creados por el hombre, incluidos campos, bosques, desiertos, océanos y otros lugares remotos y hostiles. Los robots de campo generalmente deben ser lo suficientemente resistentes y duraderos para soportar condiciones climáticas extremas, terreno accidentado y otros peligros ambientales. Es posible que también necesiten poder navegar utilizando una variedad de sensores, como GPS, LIDAR y cámaras. Pueden requerir software y algoritmos especializados para planificar y ejecutar tareas complejas. Las aplicaciones de robótica de campo incluyen monitoreo ambiental, agricultura, búsqueda y rescate, minería, construcción, exploración, entre otras.
- Ambientes no estructurados: ambientes caracterizados por la falta de orden o estructura. Pueden incluir entornos naturales, como bosques, desiertos y masas de agua, y entornos urbanos, como calles y edificios de ciudades. En entornos no estructurados, el diseño y el terreno pueden ser muy variables, con una diversidad de obstáculos y desafíos que pueden dificultar la navegación y la realización de tareas. Por ejemplo, en un entorno forestal, es posible que un robot necesite navegar entre árboles, maleza y terreno irregular, mientras evita obstáculos como rocas y troncos caídos. Los entornos no estructurados pueden presentar una variedad de desafíos para los robots, ya que generalmente requieren un alto grado de autonomía y adaptabilidad para navegar y completar tareas de manera efectiva. Para hacer frente a estos desafíos, los robots en entornos no estructurados a menudo dependen de una variedad de tecnologías de detección, como LIDAR, cámaras y otros sensores, para recopilar información sobre el entorno y permitir la toma de decisiones en tiempo real. Además, estos robots pueden incorporar algoritmos de aprendizaje automático para adaptarse al entorno a lo largo del tiempo y mejorar su rendimiento.

En el campo de la robótica se utilizan comúnmente dos enfoques de mapeo para ayudar a los robots a navegar y completar tareas en una variedad de entornos.
- El mapeo local, también conocido como “localización” o “conciencia de la situación”, implica construir un mapa del entorno inmediato alrededor del robot, generalmente a unos pocos metros de la ubicación real del robot. Por lo general, se usa en situaciones en las que el robot necesita completar tareas en un área relativamente pequeña. El mapeo local generalmente se logra utilizando varios sensores, incluidos LIDAR, cámaras y otros sensores, que brindan información sobre el entorno inmediato del robot. Al usar esta información para construir un mapa local del entorno, el robot puede navegar por el entorno, evitando obstáculos y completando tareas de manera más eficiente.
- El mapeo global involucra la construcción de un mapa de un área más grande, típicamente con un tamaño de varios metros a varios kilómetros. El mapeo global se usa típicamente cuando el robot necesita navegar a través de un entorno más grande, como en la exploración al aire libre o la agricultura. Se logra utilizando una variedad de sensores, incluidos GPS, LIDAR y cámaras, que brindan información sobre el medio ambiente en un área más grande. Al usar esta información para construir un mapa global del entorno, el robot puede navegar de manera más eficiente, evitando obstáculos y completando tareas de manera más efectiva. Sin embargo, es posible que el mapeo global no ofrezca el mismo nivel de detalle sobre el entorno inmediato que el mapeo local, lo que puede limitar la capacidad del robot para completar tareas con un alto grado de precisión.
En muchos casos, se puede utilizar una combinación de mapeo local y global para proporcionar al robot la mejor vista posible del entorno, permitiéndole navegar y completar tareas con un alto grado de precisión y eficiencia.
En campos específicos de aplicaciones robóticas, el mapeo global se puede crear utilizando múltiples fuentes de datos de satélites. Esta vista global del lugar de interés puede mejorar el rendimiento y las capacidades de los robots que operan en entornos remotos y desafiantes, por ejemplo:
- Navegación: Los satélites pueden proporcionar información precisa y confiable a través de GPS o sistemas de posicionamiento basados en satélites. Esta información se puede utilizar para mejorar la navegación de los robots de campo, permitiéndoles moverse con precisión y seguridad en entornos desafiantes.
- Comunicación: los satélites pueden actuar como un enlace de comunicación entre los robots que operan en el campo y sus operadores o centros de control ubicados en otros lugares. Esto es particularmente útil en áreas remotas donde otras formas de comunicación, como redes de radio o celulares, pueden no estar disponibles.
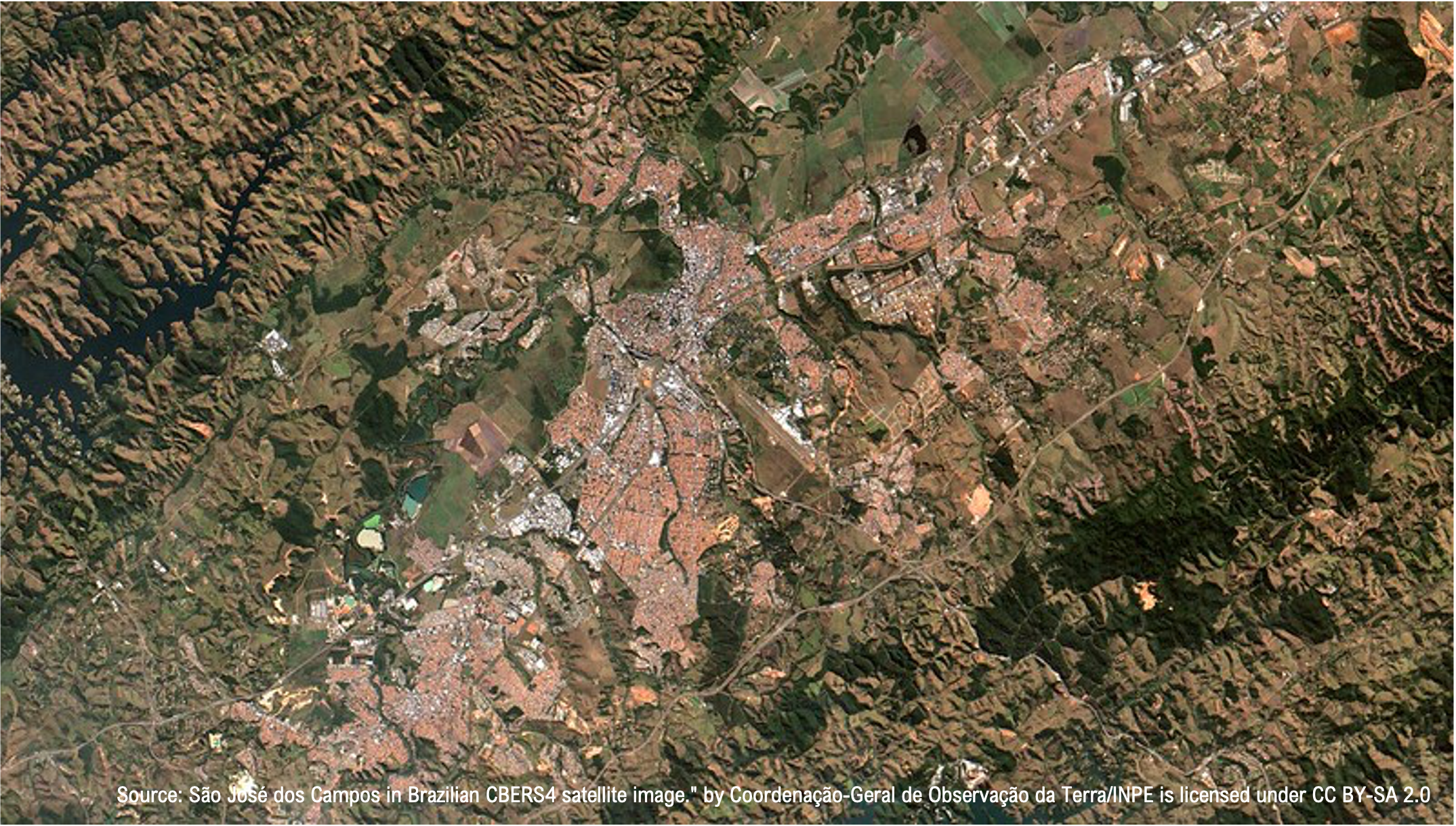
- Observación de la Tierra: los satélites pueden proporcionar imágenes de alta resolución y otros datos sobre la superficie de la Tierra, que pueden usarse para guiar las operaciones de los robots de campo. Por ejemplo, los datos satelitales se pueden usar para identificar áreas de vegetación u otras características de interés, a las que los robots de campo pueden apuntar para la recopilación de datos u otras tareas.
- Pronóstico del clima: los satélites pueden proporcionar datos en tiempo real sobre las condiciones climáticas, incluida la temperatura, la humedad, la velocidad del viento y la precipitación. Esta información se puede utilizar para guiar las operaciones de los robots de campo y garantizar su seguridad en condiciones climáticas adversas.
En general, el uso de satélites en la robótica de campo puede mejorar significativamente las capacidades y el rendimiento de los robots que operan en entornos remotos y desafiantes (y cambiantes). Una fuente de datos es la observación de la tierra desde satélites:
- Landsat: El programa Landsat proporciona imágenes satelitales de la superficie de la Tierra que se pueden usar para estudiar los cambios en el uso del suelo, la cubierta vegetal y otros factores ambientales. Las imágenes están disponibles gratuitamente a través del sitio web del Servicio Geológico de EE. UU. (USGS).
- MODIS: El Espectro-radiómetro de Imágenes de Resolución Moderada (MODIS) es un instrumento clave en dos satélites del Sistema de Observación de la Tierra (EOS) de la NASA que proporcionan datos sobre la temperatura de la superficie terrestre, la cubierta vegetal y otros factores ambientales. Los datos se pueden descargar de forma gratuita desde el sitio web de NASA Earthdata.
- Sentinel: El programa Sentinel de la Agencia Espacial Europea (ESA) incluye una serie de satélites que proporcionan imágenes de alta resolución de la superficie de la Tierra, así como datos sobre el uso del suelo, la cubierta vegetal y otros factores ambientales. Se puede acceder a los datos de forma gratuita a través del Copernicus Open Access Hub.
- Planet: Planet es un proveedor comercial de imágenes satelitales que ofrece una variedad de productos de datos, incluidas imágenes de alta resolución de la superficie de la Tierra y datos sobre el uso de la tierra, la cubierta vegetal y otros factores ambientales. Planet ofrece una cantidad limitada de datos de forma gratuita a través de su página Explorar.
- Modelo de elevación digital (DEM): Los DEM son representaciones digitales del terreno de la Tierra que se pueden utilizar para crear modelos 3D del entorno. Los datos DEM están disponibles de forma gratuita a través de una variedad de fuentes, incluidos el USGS y el sitio web Earthdata de la NASA.
Estos son solo algunos ejemplos de los tipos de datos de observación que están disponibles gratuitamente para su uso en robótica de campo. Otras fuentes de datos incluyen datos meteorológicos y oceánicos, entre otros.
Un tipo de conjunto de datos utilizado por SK Godelius para robots de campo son los Modelos digitales de elevación (DEM), que están disponibles en una variedad de resoluciones, según la fuente de los datos y el área de cobertura. Estos son algunos ejemplos de las resoluciones en las que los DEM suelen estar disponibles:
- Cobertura global: los DEM globales están disponibles con una resolución de 30 metros, lo que significa que cada píxel de la imagen representa un área de 30 metros por 30 metros en el suelo. El DEM global más utilizado es el DEM de la “Shuttle Radar Topography Mission” (SRTM), que la NASA adquirió en 2000.
- Cobertura nacional: Muchos países han desarrollado sus propios DEM de alta resolución para cobertura nacional. Por ejemplo, el USGS proporciona un DEM de cobertura nacional llamado National Elevation Dataset (NED), que tiene una resolución de 1/3 de segundo de arco (aproximadamente 10 metros) para la mayor parte de los Estados Unidos.
- Cobertura local: los DEM con una resolución aún mayor están disponibles para áreas más pequeñas o regiones específicas. Por ejemplo, el Reino Unido proporciona un DEM de cobertura nacional con una resolución de 50 metros, pero DEM más detallados con resoluciones de 1 a 5 metros están disponibles para regiones específicas.
- Datos LiDAR: son un tipo de tecnología de detección remota que puede proporcionar DEM de muy alta resolución con resoluciones inferiores a 1 metro. Los datos LiDAR se usan comúnmente para aplicaciones de mapeo y topografía, pero también se pueden usar en robótica de campo para el mapeo y la navegación del terreno.

En general, la resolución de los DEM depende de la calidad y cantidad de los datos de entrada utilizados para crear el modelo. Los datos de mayor calidad y las técnicas de procesamiento más avanzadas pueden conducir a DEM de mayor resolución, pero también pueden requerir más recursos y experiencia para adquirirlos y procesarlos.
Los robots de campo también se benefician de las comunicaciones por satélite para proporcionar un enlace de comunicación fiable y de largo alcance entre los robots y sus operadores o centros de control. A continuación, se presentan algunas características y consideraciones clave relacionadas con las comunicaciones satelitales en la robótica de campo:
- Cobertura: las comunicaciones satelitales pueden brindar cobertura en entornos remotos y desafiantes donde otras formas de comunicación, como las redes celulares, pueden no estar disponibles. Los satélites pueden cubrir grandes áreas de la superficie de la Tierra, incluidos los océanos y las regiones polares, que pueden ser difíciles de alcanzar con otros métodos de comunicación.
- Ancho de banda: las comunicaciones satelitales pueden proporcionar capacidades de transmisión de datos de gran ancho de banda, lo que puede ayudar a enviar grandes cantidades de datos, como videos o datos de sensores, desde el robot hasta el operador o el centro de control.
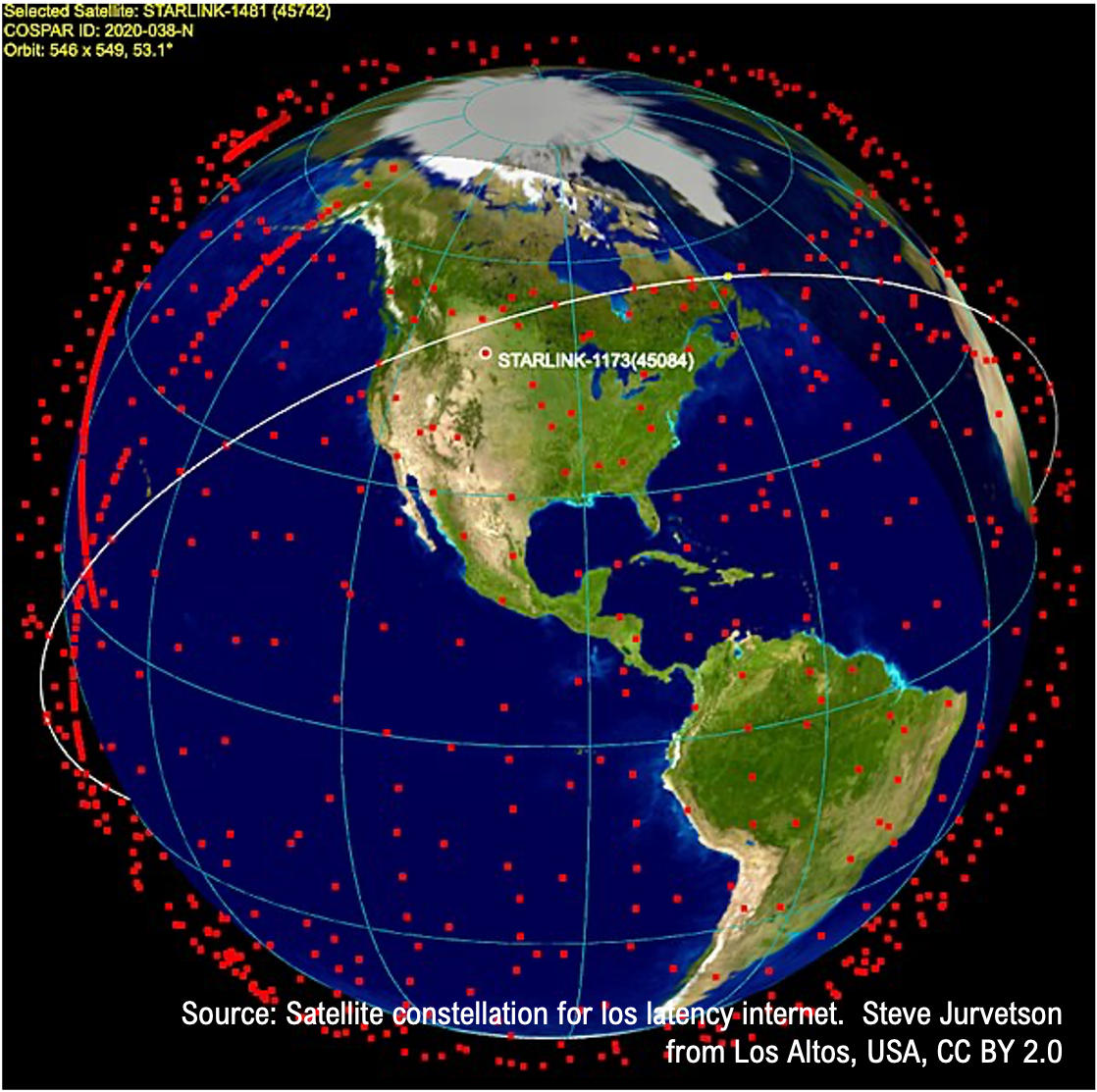
- Latencia: las comunicaciones satelitales suelen tener una latencia más alta que otras formas de comunicación debido a la distancia que debe recorrer la señal para llegar al satélite y regresar. Sin embargo, se están desarrollando sistemas de comunicación por satélite de baja latencia para satisfacer las necesidades de las aplicaciones que requieren una comunicación casi en tiempo real. Un ejemplo de un sistema de comunicación por satélite de baja latencia es la constelación de satélites de órbita terrestre baja (LEO), que incluye redes de pequeños satélites en órbita terrestre baja que pueden proporcionar comunicaciones de alta velocidad y baja latencia. Estas redes de satélites LEO pueden lograr una latencia más baja que los sistemas de satélites geoestacionarios tradicionales porque están ubicadas a una altitud mucho más baja y pueden comunicarse directamente con las estaciones terrestres sin relevos ni repetidores.
Las comunicaciones por satélite pueden ser una herramienta poderosa para permitir una comunicación confiable y de largo alcance entre los robots de campo y sus operadores o centros de control. Sin embargo, los costos y los desafíos técnicos asociados con las comunicaciones satelitales deben considerarse cuidadosamente al planificar e implementar un proyecto de robótica de campo.
Para muchas aplicaciones de robótica de campo, se necesita más que tener mapas: los cambios en las condiciones ambientales, como las tormentas de arena en el desierto, afectarán la capacidad del robot para trabajar de manera confiable. Afortunadamente, las imágenes satelitales se pueden usar para predecir tormentas de arena, ya que pueden brindar información sobre las condiciones atmosféricas, los patrones climáticos y otros factores ambientales que pueden contribuir a la formación y el movimiento de las tormentas de arena.
Estos modelos predictivos pueden proporcionar alertas tempranas de tormentas de arena, lo que puede ayudar a minimizar el impacto en las misiones del robot. En general, las imágenes satelitales y otras fuentes de datos satelitales son herramientas valiosas para predecir y mitigar el impacto de las tormentas de arena y otros eventos relacionados con el clima.
Finalmente, el uso más común de los satélites es la navegación. Sin embargo, es posible que se necesite algo más que precisión para los robots de campo en algunas aplicaciones. El error de una medición del Sistema Global de Navegación por Satélite (GNSS), como GPS, GLONASS o Galileo, es la diferencia entre la posición adecuada de un receptor en la superficie de la Tierra y la posición calculada por el receptor en función de las señales del satélite. Una variedad de factores, incluidos los factores ambientales, las limitaciones del receptor y los efectos de propagación de la señal, pueden causar errores de GNSS. A continuación, se muestran algunos ejemplos de fuentes comunes de errores GNSS:
- Errores atmosféricos: las señales GNSS pueden verse afectadas por la atmósfera terrestre, lo que puede causar errores en la posición medida. Estos errores son causados por el retraso y la distorsión de la señal a medida que atraviesa la atmósfera y puede corregirse mediante técnicas como el modelado atmosférico y el filtrado de señales.
- Errores de rutas múltiples: los errores de rutas múltiples ocurren cuando la señal GNSS se refleja en objetos cercanos, como edificios o terreno, antes de llegar al receptor. Estos reflejos pueden hacer que el receptor calcule una posición incorrecta y se pueden mitigar mediante el diseño de antenas y técnicas de filtrado de señales.
- Errores del receptor: Los receptores GNSS pueden introducir errores en el cálculo de la posición debido a limitaciones en el hardware o software del receptor. Estos errores pueden incluir la desviación del reloj, la cuantificación de la señal y el ruido de medición, entre otros.
- Errores orbitales: los satélites GNSS pueden experimentar errores orbitales debido a perturbaciones de la gravedad de la Tierra y otros factores. Estos errores pueden corregirse usando información de estaciones de monitoreo terrestres y otras fuentes.
- Errores de usuario: finalmente, los errores en el uso del sistema GNSS también pueden contribuir al error general en la posición medida. Estos errores pueden incluir la ubicación incorrecta de la antena, la sincronización de tiempo incorrecta y el error del usuario al interpretar los resultados de la medición.
El error de una medición GNSS depende de una variedad de factores. Puede oscilar entre unos pocos y decenas de metros, según la aplicación específica y la calidad del sistema GNSS.
Afortunadamente, existen varias técnicas y estrategias que se pueden utilizar para reducir los errores en las mediciones del Sistema Global de Navegación por Satélite (GNSS):
- GPS diferencial: el GPS diferencial (DGPS) es una técnica que consiste en utilizar una estación de referencia con una ubicación conocida para calcular la diferencia entre la señal GPS y la posición conocida. Esta diferencia se puede usar para corregir el cálculo de posición del receptor GPS, reduciendo los errores en la medición.
- GPS cinemático en tiempo real (RTK): RTK GPS es una técnica que involucra el uso de una estación base con una ubicación conocida y un receptor móvil para calcular información de posición precisa y de alta precisión en tiempo real. Esta técnica se basa en el uso de mediciones de la fase de la portadora y algoritmos especializados para estimar la información de posición exacta. Puede reducir los errores en la medición del GPS a unos pocos centímetros.
- Filtrado de señales: el filtrado de señales es una técnica que implica el uso de técnicas de procesamiento de señales digitales para eliminar el ruido y otras señales no deseadas de la medición del GPS. El filtrado puede reducir los errores causados por la interferencia de trayectos múltiples, los efectos atmosféricos y otras fuentes de ruido en la señal GPS.
- Ubicación y diseño de la antena: la ubicación y el diseño de la antena también pueden afectar significativamente la precisión de las mediciones GPS. Las antenas deben colocarse en un lugar despejado y sin obstrucciones, lejos de fuentes de interferencia, y deben diseñarse para minimizar la interferencia de trayectos múltiples.
- Aumento de señal: el aumento de señal implica el uso de fuentes adicionales de información, como balizas terrestres o señales de corrección satelitales, para mejorar la precisión de las mediciones de GPS. Estas señales se pueden utilizar para corregir errores causados por efectos atmosféricos, errores en la órbita de los satélites y otras fuentes de error de la señal GPS.
La combinación de estas técnicas y estrategias puede reducir los errores en las mediciones GNSS. El enfoque específico utilizado dependerá de la aplicación, la calidad del sistema GNSS que se utilice y las fuentes específicas de error que afecten a la medición.
Trabajar con satélites y datos satelitales es crucial para operar con robótica de campo en entornos no estructurados. La información satelital complementa la conciencia situacional (mapeo local) con información global, brindando a los sistemas un contexto general para entornos cambiantes.
¿Cómo utilizan nuestros clientes los datos satelitales?
Pocas industrias tienen tanta oportunidad de integrar datos satelitales como la industria minera. En SK Godelius, hemos colaborado con varias empresas para ayudar a crear soluciones robóticas personalizadas para mejorar la eficiencia, la seguridad y la productividad. Algunos ejemplos de cómo nuestros clientes están utilizando datos de GPS incluyen:
- Seguimiento de vehículos y equipos: el GPS se utiliza para rastrear la ubicación de vehículos y equipos mineros, como camiones y excavadoras. Esto permite a las empresas mineras optimizar el uso de sus equipos, reducir el tiempo de inactividad y mejorar la eficiencia general.
- Cartografía y topografía: el GPS traza mapas de minas y depósitos minerales y examina el terreno circundante. Esto permite a las empresas mineras planificar y ejecutar operaciones mineras de manera más eficiente e identificar nuevos yacimientos minerales.
- Seguridad y protección: el GPS se usa para monitorear la ubicación de los trabajadores y el equipo en tiempo real, lo que puede mejorar la seguridad y la protección en la mina.
- Sistemas de guía automáticos: el GPS se puede usar para guiar vehículos y equipos mineros, como equipos de perforación y excavación, a ubicaciones específicas dentro de la mina. Esto permite a las empresas mineras mejorar la productividad y reducir el riesgo de error humano.
- Comunicación: Mediante el uso de GPS para proporcionar un marco de referencia común, los robots pueden comunicarse entre sí utilizando sus coordenadas GPS, lo que les permite determinar su posición relativa. Esto puede reducir en gran medida la latencia en la comunicación, ya que los robots no necesitan depender de otros métodos, como el procesamiento de imágenes u otros sensores, para determinar su posición relativa.
- Exploración: el GPS se utiliza para explorar y cartografiar minas y depósitos minerales y para estudiar el terreno circundante. Esto permite a las empresas mineras identificar nuevos yacimientos minerales y planificar operaciones mineras de manera más eficiente.
Crea una solución robótica para tu empresa con SK Godelius
¿Desea obtener más información sobre cómo puede integrar datos satelitales en una solución robótica?
Como líder de la industria, concebimos, desarrollamos, fabricamos, integramos, implantamos y operamos soluciones de ingeniería relacionadas con la automatización, la teleoperación, la robotización y la conectividad de grandes máquinas, vehículos, robots y procesos en minería a cielo abierto y subterránea. No importa en qué entorno y marco operativo nos encontremos, nuestra prioridad es trabajar con usted para desarrollar proyectos individuales que aporten valor a su negocio. Ya sea que se trate de orientación, misiones autónomas, comunicaciones de baja latencia o soluciones de operación remota, nuestro equipo está listo para ayudarlo a resolver sus desafíos de robótica.
Contáctenos para obtener más información sobre nuestro proceso y cómo podemos ayudar a su empresa a innovar con robótica en entornos no estructurados.