El campo de la robótica lleva mucho tiempo impulsando la innovación, llevando a los humanos a entornos cada vez más extremos, como zonas nucleares, exploración espacial y minería profunda. Trabajar en estos entornos extremos a menudo es peligroso y para continuar sumergiéndose en estos espacios extremos (tanto de manera segura como rentable), es imperativo eliminar la necesidad de que los humanos realicen directamente este trabajo peligroso.
Hoy en día, la industria de la robótica está trabajando para crear soluciones con mayor autonomía y desarrollar la capacidad de trabajar en entornos cada vez más desestructurados. Este avance se posibilita en gran medida mediante la integración de la IA y el aprendizaje automático en soluciones robóticas como las que creamos aquí en SK Godelius.
Los robots desarrollados para trabajar en entornos no estructurados son relativamente nuevos en el mercado y están comenzando a adoptarse en muchas industrias. Creemos que el futuro de la robótica depende del avance en esta área y que los líderes de la industria que quieran mantenerse a la vanguardia deben ser conscientes del potencial de la robótica no estructurada.
Entornos estructurados frente a no estructurados
La mayoría de nosotros estamos familiarizados con la robótica en entornos estructurados; piense en ejemplos comunes, como los brazos robóticos en los planes de fabricación que completan tareas detalladas o repetitivas o la explanación, la excavación y el transporte robóticos en la industria minera. En ese entorno estructurado tradicional, los elementos dentro del entorno de trabajo del robot son estables, no hay muchas variables y el robot puede ejecutar de manera confiable su programación preestablecida debido a esta falta de entorno variado.
Por el contrario, en entornos no estructurados, el entorno de trabajo puede ser impredecible. Los entornos no estructurados contienen elementos o variables que son impredecibles, y un robot tradicional no puede aprovechar la programación preestablecida para completar una tarea de manera confiable.
El ingeniero de SK Godelius, Sergio Boccardi, explica la diferencia: “En una cadena de montaje donde hay un robot que recoge objetos de una cinta transportadora, se conoce con gran precisión la geometría de los muebles y maquinaria que está al alcance del robot. Por lo tanto, el programador del robot considera estas geometrías en los movimientos del robot. La geometría conocida se incorpora de tal forma que el robot, aunque tenga ciertos grados de libertad, no chocará con las estructuras que lo rodean porque ocupan un espacio perfectamente conocido y “mapeado” en el programa que controla el robot.”, dice Boccardi.
“Supongamos ahora que necesitamos un robot para tomar la misma parte que en el ejemplo anterior, pero puede estar en un área más grande con planos inclinados y puede haber otros objetos desconocidos. El método de programación que usamos en el ejemplo anterior no sería funcional ya que la geometría del entorno y los objetos no se conocen al programar el robot.
Por lo tanto, ahora necesitamos un robot que “entienda” el entorno y pueda construir una trayectoria en tiempo de ejecución para lograr el objetivo. Cambia radicalmente la programación del robot y el tipo de sensores que debemos incorporar para que el robot pueda “entender” el entorno”.
Este simple ejemplo demuestra que un entorno no estructurado es un desafío mucho más complejo para la robótica y requiere nuevas e innovadoras formas de pensar y nuevas tecnologías. Ahí es donde entra la autonomía robótica y la inteligencia artificial.
Autonomía e IA para entornos no estructurados
Los robots que operan en entornos no estructurados alguna vez no fueron posibles. Pero hoy, al integrar los principios de la inteligencia artificial (IA), la autonomía asistida y permitir que los robots definan estrategias de manera autónoma para resolver objetivos complejos, la robótica es la solución ideal para muchos desafíos de la industria. “Una vez que “entiendes” el entorno, el robot debe “crear” una estrategia para llegar a la meta”, dice Boccardi. “Desde el punto de vista informático, la ‘creatividad’ puede verse como un proceso mediante el cual el robot construye miles de soluciones simuladas que pueden aplicarse a la realidad actual. Estas soluciones deben ser filtradas para descartar aquellas que generan colisiones y aquellas que no alcanzan el objetivo. Luego, el proceso de aprendizaje permitirá la selección del “mejor resultado” en función de algunos criterios de optimización”.
Sin embargo, la autonomía está limitada a la disponibilidad y sofisticación de la IA. Boccardi comparte: “El nivel de autonomía en el desempeño de estos robots dependerá de la IA disponible. Por ejemplo, podemos hacer que un robot encuentre una pieza en particular en un cajón lleno de piezas. Podemos hacer que el robot aprenda a coger la pieza en función de su forma y de su forma en la caja. Sin embargo, para tomar la pieza, debemos “despejar” el entorno debido a la presencia de otros objetos. Aquí es donde aparece el concepto de autonomía asistida, donde un humano define las estrategias en varios niveles y el robot cumple cada paso definido por el humano”.
Al aprovechar un avance tecnológico tras otro, los robots podrán operar en entornos no estructurados y se convertirán cada vez más en opciones viables para que la industria aumente la eficiencia y reduzca los riesgos.
“La robótica para entornos no estructurados nos lleva a desarrollar otras disciplinas relacionadas con la IA para dotar a los robots de la capacidad de resolver problemas a un nivel superior. La IA nos permite construir robots con una inteligencia comparable a la de una cucaracha, pero aún tenemos que competir con los chimpancés”.
– Sergio Boccardi, ingeniero de SK Godelius
Cómo Godelius está innovando en robótica en entornos no estructurados
Si bien aprovechar la IA en robótica para entornos no estructurados sigue siendo un avance reciente, SK Godelius está liderando el camino en el desarrollo de soluciones robóticas para entornos no estructurados.
En asociación con Vale y NORCAT, SK Godelius está desarrollando soluciones para la carga de vagones de tren con ácido. En la carga de cuidado del tren con ácido, el ácido sulfúrico/fundidor (un subproducto químico común del proceso de fundición) se carga en los vagones del tren para su remoción en el sitio. Dados los riesgos asociados con la exposición humana a un ácido concentrado, se recolecta, almacena y transporta cuidadosamente para garantizar la salud y la seguridad de los trabajadores y las comunidades circundantes. La solución robótica ideal permitiría a los trabajadores mantenerse fuera de peligro.
El equipo de SK Godelius integró IA y tecnologías de operación semiautónoma para crear una solución que es fundamentalmente nueva para la industria.
5 innovaciones en el PoC
- Se identifica un escenario no estructurado debido a la variedad de vagones y la forma en que el robot debe acercarse a cada uno; es imposible asegurar de antemano la ubicación espacial de los componentes o sus formas.
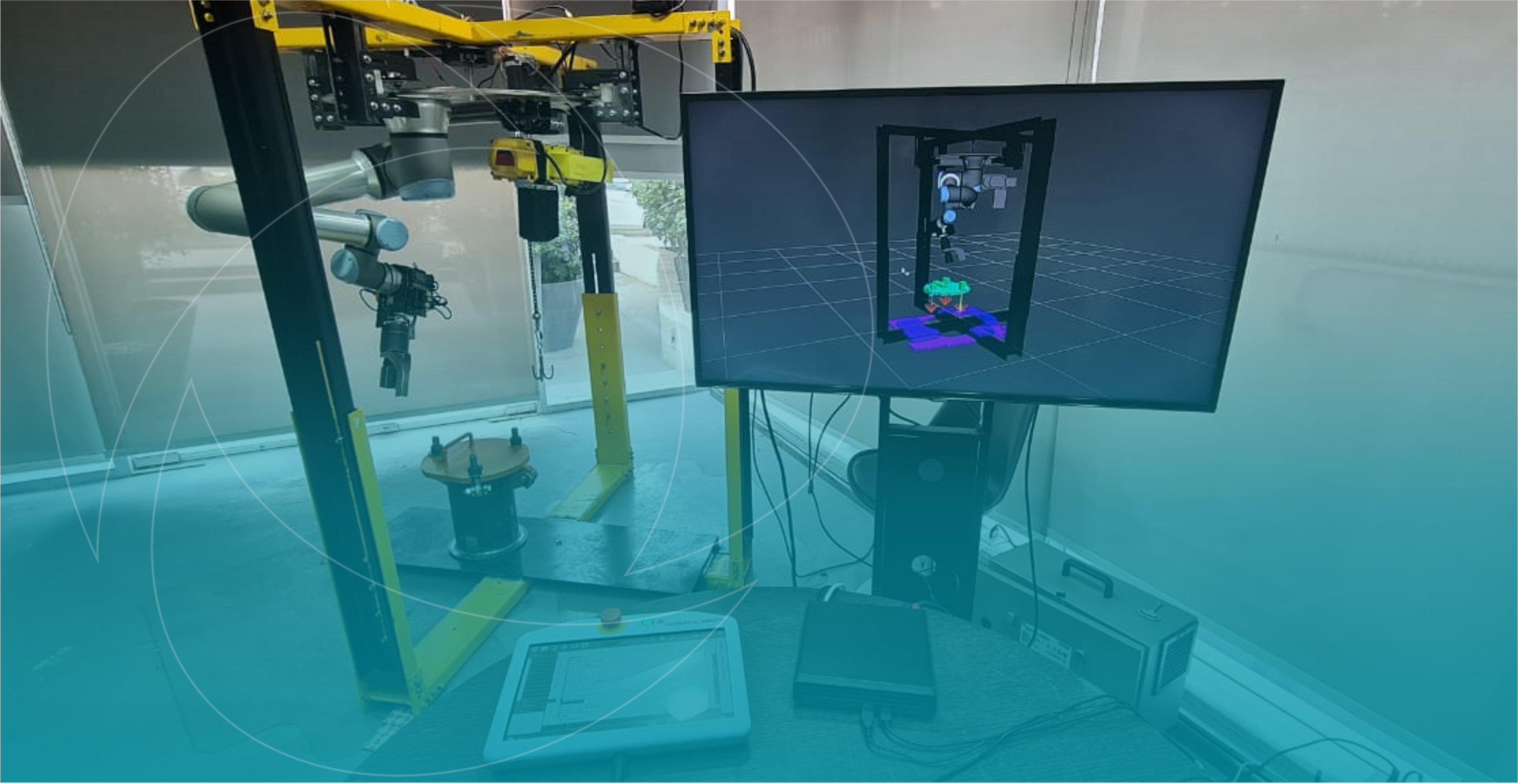
- Se desarrolló un sistema combinado de altimetría de tipo topográfico con un sistema de visión artificial basado en una cámara de visión estéreo y la proyección de un patrón aleatorio.
- Se construye un modelo de gemelo digital en tiempo real con la información gráfica del entorno y un modelo digital de las partes del robot y el resto del equipo. Representa el medio ambiente y los sistemas involucrados.
- Se desarrolló un planificador de trayectorias que simula varias trayectorias en el gemelo hasta lograr una factible y óptima.
- El paso de insertar la herramienta en la tuerca no se pudo resolver calculando trayectorias porque es un entorno no estructurado. Para resolverlo, usamos controles orientados a la fuerza, por lo que el robot actúa como si tuviera sentido del tacto.
Este proyecto de prueba de concepto es un punto de partida para más innovaciones y aplicaciones para la carga de cuidado de trenes con ácido que mantienen a los trabajadores seguros.
Personalice una solución de robótica no estructurada para su negocio con SK Godelius
Nuestro equipo está listo para ayudarlo a resolver sus desafíos de robótica. Como líder de la industria, concebimos, desarrollamos, fabricamos, integramos, implantamos y operamos soluciones de ingeniería relacionadas con la automatización, la Teleoperación, la robotización y la conectividad de grandes máquinas, vehículos, robots y procesos en minería a cielo abierto y subterránea. No importa en qué entorno y marco operativo nos encontremos, nuestra prioridad es trabajar con usted para desarrollar proyectos individuales que aporten valor a su negocio.
Contáctenos para obtener más información sobre nuestro proceso y cómo podemos ayudar a su empresa a innovar con robótica en entornos no estructurados.