El ácido sulfúrico es un subproducto típico del proceso de fundición en la minería. Dados los riesgos asociados con la exposición humana a un ácido concentrado, se recolecta, almacena y transporta cuidadosamente para garantizar la salud y la seguridad de los trabajadores y las comunidades circundantes.
En el caso de la instalación de Copper Cliff de Vale, ubicada en Sudbury, Ontario, varias personas trabajan en la instalación de carga de ácido. En un día normal, entre 24 y 36 vagones cisterna se cargan con ácido.
Los vagones cisterna vacíos se llevan a la estación de carga de ácido sulfúrico. Una vez estacionado y asegurado debajo de la rampa/puente de carga de ácido, la válvula de llenado en la parte superior del vagón cisterna se desbloquea manualmente con llaves para tubos y otras herramientas manuales. Durante esta actividad, la presión acumulada en el tanque, desarrollada naturalmente debido a las diferencias de temperatura entre la atmósfera y el tanque sellado, puede hacer que un trabajador desprevenido sea “rociado” por ácido residual que se libera como resultado de la despresurización. Aunque todos los trabajadores usan equipo de protección personal, crea el riesgo de exposición que puede provocar quemaduras por ácido.
Desafío
Se identifica un escenario no estructurado debido a la variedad de vagones, la diversidad de escotillas, distintos tipos de tuercas, etc. Es imposible asegurar de antemano la ubicación espacial de las escotillas y sus componentes o formas. Impone retos como:
- Manipular diferentes tipos de componentes, sin intervención física humana, en entornos no estructurados.
- Los componentes no se pueden modificar y se debe permitir la manipulación manual.
- Crear una solución capaz de manejar una amplia variedad de modelos de escotillas sin modificarlos.
- Desarrollar una solución robótica robusta que prevea la capacidad de trabajar en ambientes ácidos y condiciones climáticas adversas.
Solución
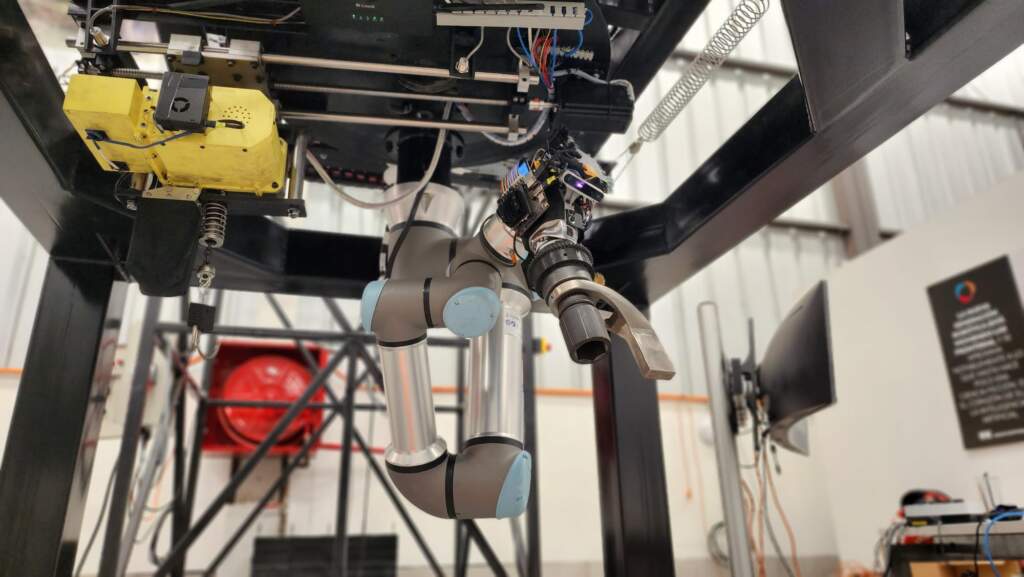
SK Godelius desarrolló una solución basada en un brazo robótico que posiciona una herramienta capaz de aflojar y volver a apretar las tuercas que sueltan la tapa de la escotilla.
- Se desarrolló un sistema de altimetría de tipo topográfico combinado con un sistema de visión artificial basado en una cámara de visión estereoscópica y la proyección de un patrón aleatorio.
- Se construyó un modelo de gemelo digital en tiempo real con la información visual del entorno y un modelo digital de las partes del robot y el resto del equipo. Representa el medio ambiente y los sistemas involucrados.
- Se desarrolló un planificador de trayectorias que simula varias trayectorias en el gemelo hasta lograr una factible y óptima.
- Dado el ambiente no estructurado, la inserción de la herramienta en las tuercas requiere que -además de calcular las trayectorias se utilicen controles orientados a la fuerza, por lo que el robot actúa como si tuviera sentido del tacto.
“Encontrar el socio adecuado es clave: las habilidades técnicas son importantes, pero la capacidad de co-crear, compartir riesgos y encontrar formas creativas para demostrar conceptos rápidamente fueron factores clave de éxito en el trabajo que hicimos juntos.”
Suzanne Balima, Strategy and Business Transformation en Vale
Resultado
El desarrollo de un robot que puede trabajar completamente teleoperado o semiautónomo con la asistencia humana de un operador remoto para completar la tarea propuesta o ajustarse a situaciones imprevistas y/o complejas. Las tecnologías de última generación aprovechadas en nuestra solución incluyen:
- Visión estereoscópica, permitiendo al operador tener la percepción de profundidad para interactuar de forma natural con el entorno.
- Cámara 3D para detectar tornillos y alinear la herramienta con el eje del tornillo. La información de la cámara 3D se aplica automáticamente para determinar el movimiento de la herramienta de cada tuerca.
- Sistema de posicionamiento
- Evitación de colisiones
- Equilibrio de poder entre los elementos
- Conectividad
- Ingeniería Mecánica
“Fue increíble ver cómo el proyecto evolucionaba de un modelo 3D a desarrollar gradualmente el hardware y el software del robot y verlo cobrar vida. Por parte de Vale, fue una experiencia fantástica aprender del equipo de Godelius desde una perspectiva técnica, pero también ver su ADN innovador contagiarse a nuestro equipo. Fue un verdadero placer trabajar juntos.”
Suzanne Balima, Strategy and Business Transformation en Vale